About me
I am a Ph.D. researcher in Computer Vision and Robotics at Monash University, Australia, working under the supervision of Associate Professor Hamid Rezatofighi and Professor Jianfei Cai. My research focuses on the intersection of computer vision, deep learning, and robotics, with particular expertise in multi-modal low-level perception tasks including object detection, tracking, and trajectory prediction for autonomous systems.
With a publication record at top-tier venues such as CVPR, ECCV, AAAI, and RA-L, I am passionate about developing cutting-edge algorithms that bridge the gap between theoretical research and real-world applications. My work spans from designing novel deep learning architectures using Transformers and Diffusion models, to creating large-scale in-the-wild datasets that advance the field of robotic perception in complex, crowded environments.
Beyond research, I actively contribute to the academic community as a reviewer for premier computer vision conferences and journals (CVPR, ECCV, AAAI, ICCV, ICRA, TPAMI), while also applying my expertise in industry through AI engineering roles. I believe in open science and reproducible research, consistently releasing code and datasets to benefit the broader research community.
What I'm working on
-

Advanced Perception Research
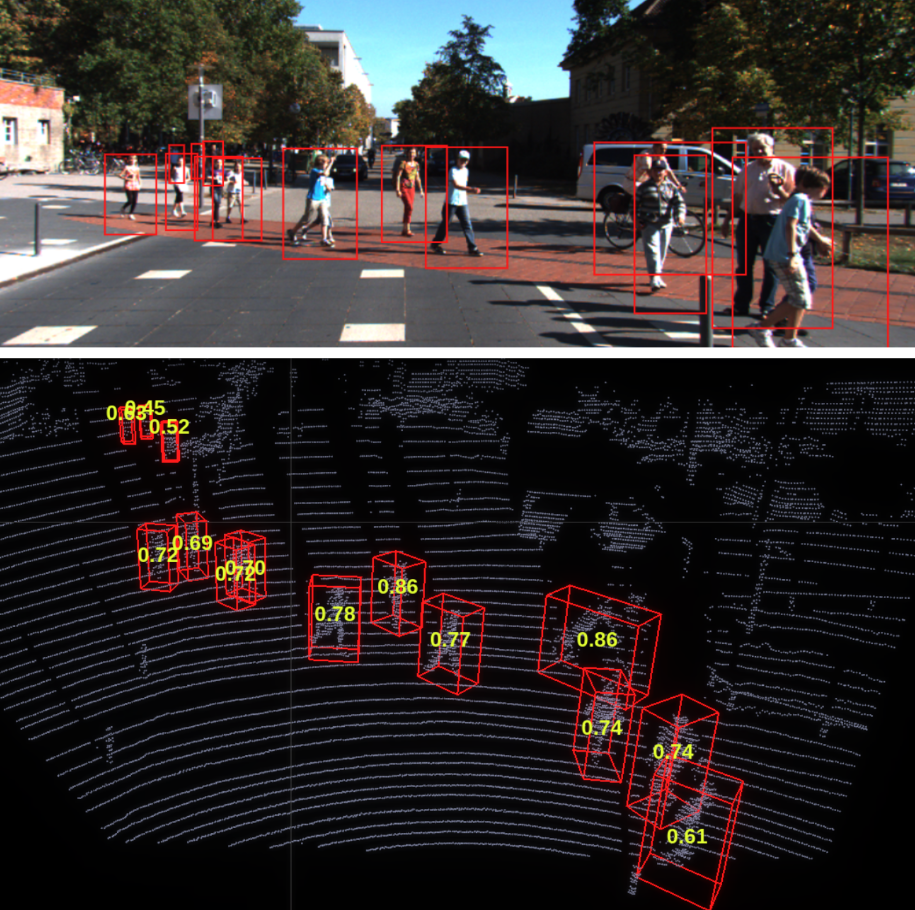
Developing state-of-the-art deep learning algorithms using Transformers, Diffusion models, and novel geometric approaches for multi-modal perception tasks including 3D object detection, tracking, and trajectory prediction in autonomous robotic systems.
-

Publishing & Reviewing
Publishing first-author papers at premier venues (CVPR, ECCV, RA-L), creating open-source datasets and benchmarks, mentoring students, and serving as a reviewer for top-tier computer vision conferences and journals while fostering collaborative research initiatives.